昌晖仪表通俗介绍双增益PID的控制原理,控制特点和具体应用,丰富大家对的PID控制知识,对选择调节器和用好调节器大有帮助。
理论之树是用来指引方向的,不是用来吊死的。老文青歌德曾经是小文青,在法院里抄抄写写,凭着家族关系本可以在司法界混一碗好饭。但风流年少的歌德被告了一恶状,蹲进大狱,突然茅塞顿开,写出不朽名作《少年维特之烦恼》。但歌德的另一句话更有名:理论是灰色的,生命之树常青。PID就像生命之树一样,枝繁叶茂。在实践中,PID有很多表兄弟,帮着大表哥一块打天下。
比例控制的特点是,偏差大,控制作用就大。但在实际中有时还嫌不够,最好偏差大的时候,比例增益也适当加料,进一步加强对大偏差的矫正作用,及早把系统拉回到设定值附近;偏差小的时候,当然就不用那么急吼吼,慢慢来就行了,所以增益减小一点,加强稳定性。这就是双增益PID(也叫作双模式PID)的起源。想想也对,昌晖仪表以高射炮瞄准敌机为例,如果炮管还在离目标很远的角度,那应该先尽快地把炮管转到目标角度附近,动作猛一点才好,这时稳定性和控制精度都不是主要问题;但炮管指向已经离目标很近的时候,动作就要慢下来,精细瞄准,要不然炮管指向由于高增益晃来晃去,反而瞄不准敌机。工业上也有很多类似的应用。
双增益PID的一个特例是死区PID(PID with Dead Band),小偏差时增益为零,也就是说,测量值和设定值相差不大的时候,就随它去,锁定控制量,实际上就是不加控制。这在水库的水位控制里用得很多。水库不仅用来蓄水,还可以用来缓冲流量变化,水位到底精确控制在100.5m还是118.7m并不紧要,需要的是大概在110m样子,最主要的是不能高于140m上限或者低于80m下线。但是,从水库流向下游的流量要尽可能平稳,否则下游流域的水流忽大忽小,会不必要地影响流域人民的生产和生活,也对鱼虾虫鸟的生态不利。死区PID对这样的控制问题是最合适的。但是天下没有免费的午餐。死区PID的前提是液位在一般情况下会“自然”稳定在死区内,如果死区设置不当,或系统经常受到大幅度的扰动,死区内的“无控”状态会导致液位不受抑制地向死区边界“挺进”,最后进入“受控”区时,控制作用“轻轻一拍”,但难以正好把液位拍进死区而停在那里,而是容易过头,使液位向相反方向不受抑制地“挺进”。最后的结果是液位永远在死区的两端振荡,而永远不会稳定下来,永远摆动下去。双增益PID也有同样的问题,只是比死区PID好一些,毕竟只有“强控制”和“弱控制”的差别,而没有“无控区”。在实用中,双增益的内外增益差别小于1:2没有多大意义,大于1:5就要注意上述的持续振荡或摆动问题。
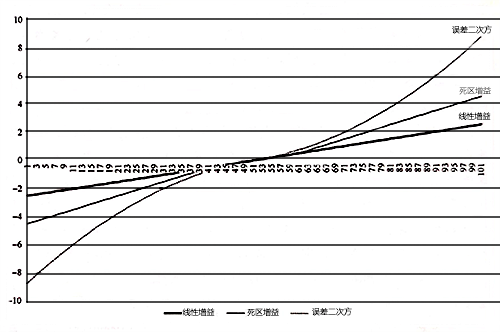
图1 双增益PID在误差接近于零的时候为低增益(斜率较低),在误差较大的时候为高增益(斜率较高);误差二次方有类似的特征,但增益变化是连续的
双增益或死区PID的问题在于增益的变化是不连续的,控制作用在死区边界上有一个突然的变化,容易诱发系统的不利响应,二次方误差PID就没有这个问题。误差一经二次方,控制量对误差的响应就成了抛物线,同样可以达到“小偏差小增益、大偏差大增益”的效果,还没有突然的、不连续的增益变化。但是误差二次方有两个问题:一是误差接近于零的时候,增益也接近于零,回到上面死区PID的问题;二是很难控制抛物线的具体形状,或者说,很难制定增益在什么地方拐弯,拐弯有多急。对于第一个问题,可以在误差二次方PID上迭加一个基本的线性PID,使零误差时增益不为零;对于后一个问题,可以考虑采用带圆滑转角的双增益(见图2)。

图2 带圆滑转角的双增益,既实现双增益,又保证圆滑过渡
双增益有两个值高值和低值,用图形表示有两种表示法。一是输出对输入的关系,斜率对应于增益,这就是三折线:中间的内段斜率较小,对应于低增益;两侧的外段斜率较大,对应于高增益。还有一个图形表示方法是增益对输入,那就好像一个壕沟的剖面,沟底对应于低增益,地面对应于高增益,而沟壁是上下垂直的,代表两个增益值之间的不连续过渡。如果沟壁是斜坡,这个斜坡就对应了双增益之间的连续过渡。换到用输入对输出的图形表示的话,沟壁斜坡就对应于内外段折线之间的圆角过渡,斜坡越缓,圆角越大。这个路子的潜力很大,要是“野心”大一点,再加几个计算单元,还可以做出不对称的增益,也就是说,升温时增益低一点,降温时增益高一点,以处理加热过程中常见的升温快、降温慢的不对称增益问题。
双增益或误差二次方都是在比例增益上做文章,同样的“勾当”也可以用在积分和微分上。更极端的一种PID规律叫作积分分离,其思路是这样的:比例控制的稳定性好,响应快,所以偏差大的时候,把PID中的积分关闭掉,消除积分的滞后影响,加速偏差归零;偏差小的时候,精细调整、消除余差是主要问题,所以减弱甚至关闭比例作用,而以积分作用作为主要控制。这个概念是好的,但具体实施的时候,有很多无扰动切换和初始化的问题。
从双增益和误差二次方更进一步,就是自适应增益(Gain Scheduling)。经验告诉我们,在不同工艺条件下,增益要随之调整。如果有相对确定的关系,比如系统通过流量为100t/h的话,加热回路的增益应该为3.0;上升到200t/h的话,增益就应该相应降低到2.0;诸如此类。有这样明确的增益调整关系的话,不难实现增益的自动调整。有意思的是,自适应增益在概念上不深奥,在道理上也很容易接受,但在实践中很少使用。关键还是人们对自动调整增益这样重要的控制参数不放心,回路特性太复杂,出了问题的话,死都不知道怎么死的。
双增益PID和自适应PID在理论上很难分析系统的稳定性,在实用中却解决了很多困难的问题,但在教科书和主流参考书中却很少提及。在昌晖仪表生产的调节器产品中,64段液晶可编程调节器采用的就是双区PID控制,抑制超调,提高控制精度。